Robotyczne ramię NexArm od Hiwonder
NexArm od Hiwonder to robotyczne ramię nowej generacji typu Embodied AI, zaprojektowane z myślą o szybkiej walidacji uczenia przez naśladowanie oraz uczenia ze wzmocnieniem. Dzięki bezpośredniej kompatybilności z Hugging Face LeRobot pozwala wdrażać modele bez żmudnego rozwiązywania problemów sprzętowych.
W porównaniu do SO-ARM101
NexArm wykorzystuje dwuprocesorową architekturę ESP32 + AT32, posiada w pełni metalową konstrukcję, większy promień roboczy, obrotową podstawę oraz chwytak z równoległymi prowadnicami. Od razu po uruchomieniu obsługuje wiele metod sterowania. Dzięki temu stanowi dopracowaną platformę inżynieryjną dla projektów z zakresu Embodied AI.
Bliższe spojrzenie na NexArm
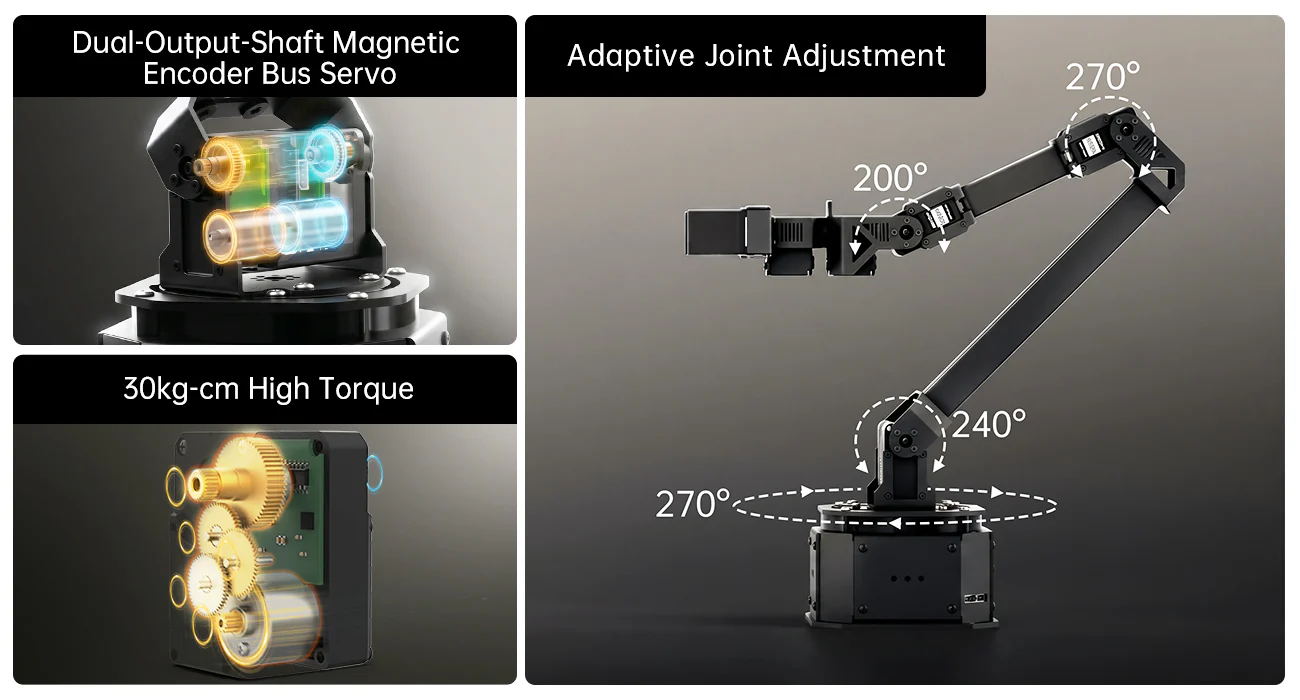
Przemysłowa precyzja i wyjątkowo płynny ruch
Dokładność algorytmu nie ma znaczenia, jeśli sprzęt cierpi na nieregularne drgania przegubów. NexArm posiada w pełni metalową konstrukcję napędzaną precyzyjnymi serwomechanizmami magistralowymi z enkoderami magnetycznymi o momencie 65 kg·cm, zapewniającymi powtarzalność na poziomie ±2 mm. W połączeniu z zaawansowanymi algorytmami kinematyki odwrotnej oraz wygładzaniem krzywych, ramię natywnie oblicza złożone trajektorie, minimalizując drgania podczas startu i zatrzymania, co przekłada się na płynny i naturalny ruch.
Łatwe uczenie przez naśladowanie — tryb Leader-Follower
Zapomnij o ręcznym kodowaniu lub opóźnionych pipeline’ach, które psują jakość zbiorów danych. Dzięki specjalizowanej, dwuprocesorowej architekturze synchronizacji sprzętowej ESP32 + AT32, NexArm umożliwia śledzenie ruchu pomiędzy ramieniem prowadzącym i podążającym na poziomie milisekund. Taka sprzętowo zsynchronizowana struktura przekazuje czyste dane w czasie rzeczywistym bezpośrednio do Hugging Face LeRobot, przyspieszając trenowanie polityk sterowania jak nigdy wcześniej.
Nowoczesny układ obliczeniowy 6 TOPS i multimodalna interakcja AI
NexArm pozwala uruchamiać zaawansowane procesy wizyjne bezpośrednio na ramieniu, bez konieczności korzystania z komputera PC. Dzięki wyposażeniu w moduł wizyjny K230 o wydajności 6 TOPS, ramię integruje percepcję bezpośrednio na urządzeniu, oferując dużą moc obliczeniową na brzegu sieci. Umożliwia to wdrażanie multimodalnych dużych modeli AI oraz ponad 30 zaawansowanych funkcji — takich jak śledzenie YOLO czy chwytanie z koordynacją ręka–oko — bezpośrednio na biurku.
20.06.2026
źródło: Hiwonder
NexArm, Hiwonder, robotic arm, ramię robotyczne, Embodied AI, AI robotics, robotyka AI, Hugging Face LeRobot, LeRobot, imitation learning, uczenie przez naśladowanie, reinforcement learning, uczenie ze wzmocnieniem, leader-follower mode, tryb leader-follower, robot arm for AI research, robotyka edukacyjna, robotyka badawcza,ESP32, AT32, dual-chip architecture, architektura dwuprocesorowa, magnetic encoder servos, serwa z enkoderem magnetycznym, bus servos, 65 kg·cm servo, all-metal robotic arm, metalowe ramię robotyczne, rotating base, obrotowa podstawa, parallel-rail gripper, chwytak równoległy, ±2 mm repeatability, inverse kinematics, kinematyka odwrotna, smooth motion control, K230 vision module, 6 TOPS AI module, edge AI, edge computing, computer vision, machine vision, YOLO tracking, object tracking, hand-eye coordination, hand-eye coordinated grasping, multimodal AI, AI perception, autonomous grasping, vision-guided robotics