VR gloves
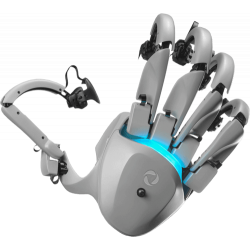
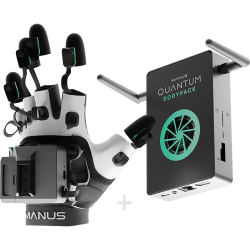
Haptic VR gloves are advanced devices that enable natural and precise interaction with objects in virtual reality. Thanks to motion sensors and feedback systems, users can not only see and grasp virtual objects but also feel their shape, resistance, and texture.
Haptic technology in gloves uses vibrations, microactuators, or resistance mechanisms to simulate touch and pressure. These solutions are used in medical training, industrial simulations, 3D design, education, and advanced VR games.